")
Каталог коллаборативных роботов
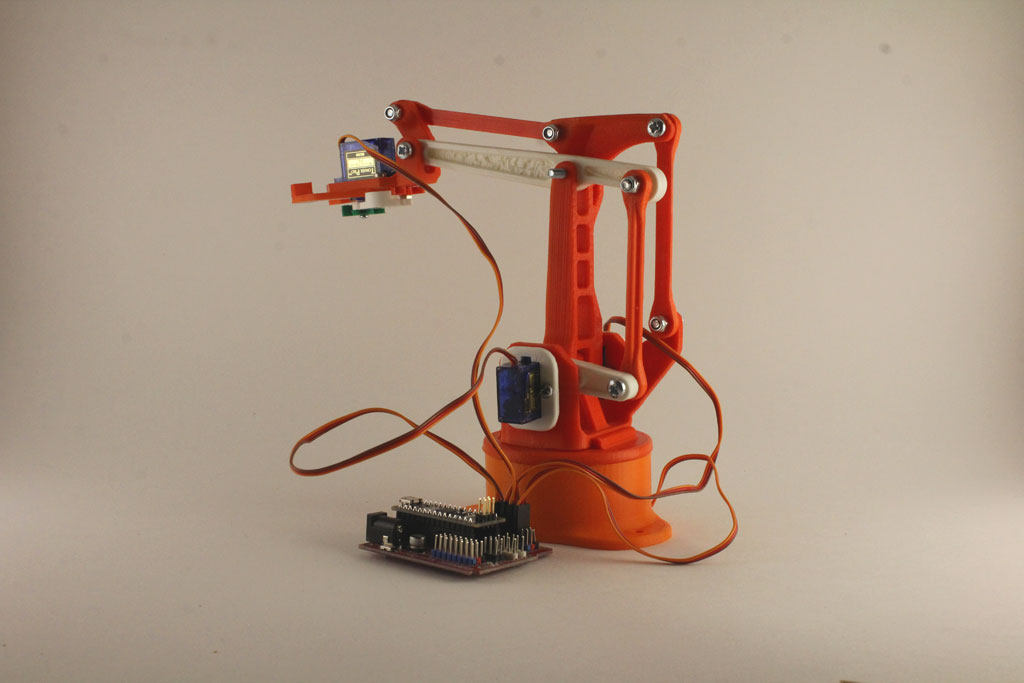
В наше время потребности человечества всё время растут. Компаниям приходится изготавливать всё больше и больше продукции, и им нужно точное и стабильное производство. Все сегменты приводятся в движение с помощью сервомоторов, получающих градусные значения с Arduino, которые приходят с мобильного приложения. Мобильное приложение подсоединяется к Arduino с помощью Bluetooth-модуля. Корпус данной модели полностью напечатан на 3D-принтере, изначальная конфигурация идёт с клешнёй, поэтому главная функция — перемещение предметов, но насадки можно легко менять и использовать манипулятор в других целях. В результате работы был получен работающий прототип манипулятора, который воспринимает команды с мобильного приложения и приходит в движение.













Несмотря на кажущееся различие человека и промышленного робота, у них есть немало общего. Первое очевидное сходство — это суставы, места соединений костей человека и звеньев у робота, которые придают им подвижность. В основе промышленного робота лежит человеческая рука. Посмотрите на нее: кости и суставы в плече, локте и запястье, благодаря которым рука может свободно сгибаться и двигаться. По этому же принципу работает и робот, только вместо костей - звенья. Кроме того человека и робота объединяет и принцип передачи энергии звеньев к суставам для их движения.










В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System. Это будет наш первый мобильный робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись. Если вы сомневаетесь, что вам это подходит, повторите проект попроще, например робота для езды по линии. Создание свеого робота — это не самая сложная, но и не тривиальная задача.